Robotlaşdyrylan jylawlaýjy enjam – Ýokary takyklykly awtomatlaşdyrylan ýüzleý işläp bejeriş





Jikme-jik diagramma
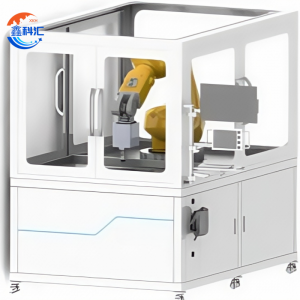

Robot jylaňlaýjy maşynyň umumy syny
Robot Jylawlaýjy Maşyn, takyk önümçilikde iň ýokary talaplary kanagatlandyrmak üçin döredilen ösen, doly awtomatlaşdyrylan ýüz işlemegiň ulgamydyr. Ol alty okly robot dolandyryşyny, güýç bilen yzyna gaýtarma jylawlaýjy tehnologiýasyny we iki kelleli konfigurasiýany birleşdirip, dürli materiallary we çylşyrymly geometriýalary ajaýyp takyklyk we yzygiderlilik bilen işläp bilýär.
Optiki linzalar, aerokosmos bölekleri, takyk inženerçilik bölekleri ýa-da ýarymgeçirijiler üçin ulanylyşlar üçin bolsun, bu enjam durnukly, gaýtalanýan we ýokary hilli ýüz örtüklerini üpjün edýär - hatda nanometr derejesindäki çydamlylyklarda hem.


Robot jylaňlaýjy maşynyň iş bölekleriniň giňişleýin utgaşyklylygy
Sistema aşakdakylaryň işlenilmegini goldaýar:
-
Tekiz ýüzleraýna, keramika we metal plitalar üçin
-
Silindr we konus şekillerirulonlar, şaftlar we turbalar ýaly
-
Sferiki we asferiki komponentleroptiki ulgamlar üçin
-
Erkin we okdan daşary ýüzlerçylşyrymly egriler we geçişler bilen
Onuň köpugurlylygy ony amatly edýärköpçülikleýin önümçilik we ýokary takyklykly ýörite önümçilik.
Robot jylaňlaýjy maşynyň esasy aýratynlyklary we artykmaçlyklary
1. Iki jilalaýjy kelle tehnologiýasy
-
bilen enjamlaşdyrylanbir gezek aýlanýanweöz-özünden aýlanmakçeýelik üçin jylaňlaýjy kelleler.
-
Gurallary çalt çalyşmak mümkinçiligi uzak wagtlap işlemezden köp sanly işleme režimlerini goldaýar.
-
Gödek we inçe jylaňlama tapgyrlarynyň arasynda geçiş üçin ideal.
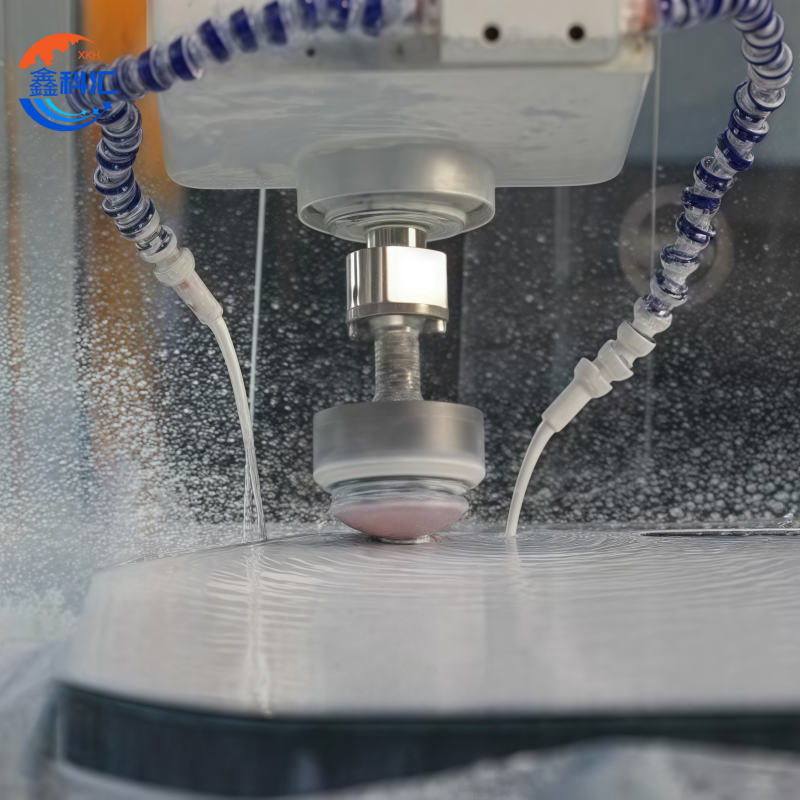
2. Takyk Güýç Dolandyryş Ulgamy
-
Real wagt režiminde gözegçilikbasyş, temperatura we jylaňlaýjy suwuklygyň akymy.
-
Güýç bilen yzygiderli ulanmak iş böleginiň ýüzüniň deň derejede işlemegini üpjün edýär.
-
Ýüziň deňsizligine awtomatiki usulda uýgunlaşyp bilýär.
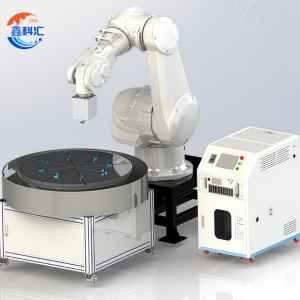
3. Alty okly robot dolandyryşy
-
Çylşyrymly geometriýalary dolandyrmak üçin doly hereket azatlygy.
-
Öňdebaryjy algoritmler arkaly hasaplanan tekiz we takyk hereket ýollary.
-
Modele baglylykda ±0,04 mm-den ±0,1 mm-e çenli ýokary gaýtalanýan ýerleşdiriş takyklygy.
4. Akylly Awtomatlaşdyrma we Ölçeg
-
Takyk sazlamak we deňleşdirmek üçin awtomatiki kalibrleme gurallary.
-
Takyk ýerleşýän ýerini kesgitlemek üçin koordinata ölçeg ulgamy.
-
Isleg boýunçaonlaýn galyňlyk gözegçiligihakyky wagt režiminde hil gözegçiligi üçin.
5. Senagat derejesindäki gurluşyk hili
-
Iki serwomotorly dizaýn jylawlama netijeliligini we durnuklylygyny ýokarlandyrýar.
-
Berk mehaniki gurluş titremäni azaldýar we uzak möhletli berkligini üpjün edýär.

Robot jylaňlaýjy maşynyň tehniki aýratynlyklary
| Enjam modeli | Robot göwresi | Ýerleşdiriş takyklygyny gaýtalaň | Gaýtadan işlemegiň diametriniň diapazony | Ýeke Aýlanmaly Jylaw Başlygy | Köp aýlanýan jylawlaýjy başlyk | Kiçi gurallar | Esasy teker görnüşini jylamak | Sferiki kelleleri jylamak | Çalt üýtgeşmäni tamamlaň | Awtomatiki Kalibrleme Guraly | Koordinata ölçeg başlygy | Onlaýn galyňlyk gözegçiligi | Sanly dolandyryş platformasy |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0.04mm / doly diapazon | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0.05mm / doly diapazon | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0.05mm / doly diapazon | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0.06mm / doly diapazon | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1mm / doly diapazon | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1mm / doly diapazon | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1mm / doly diapazon | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Köplenç berilýän soraglar – Robot jylaňlaýjy maşyn
1. Robot jylaňlaýjy maşyn nähili iş böleklerini işläp bilýär?
Robot jylawlaýjy maşynymyz dürli görnüşleri we ýüzleri, şol sanda tekiz, egri, sferiki, erkin we çylşyrymly konturlary goldaýar. Ol optiki bölekler, takyk galyplar, metal ýüzler we beýleki ýokary takyklykly jylawlaýyş ulanylyşlary üçin amatlydyr.
2. Bir aýlawly we köp aýlawly jylawlaýjy kelleleriň arasyndaky tapawut näme?
-
Ýeke Aýlanmaly Jylaw BaşlygyGural bir okuň daşyndan aýlanýar, bu bolsa standart ýüzleýi işläp taýýarlamak we materiallary ýokary tizlikde aýyrmak üçin idealdyr.
-
Köp aýlanýan jylawlaýjy başlykGural aýlanmagy öz-özünden aýlanmagy (orbitde aýlanmagy) utgaşdyrýar, bu bolsa egri we düzensiz ýüzlerde has deň derejede jylawlamaga mümkinçilik berýär.
3. Işläp çykarmagyň iň ýokary diametri näçe?
Modele baglylykda:
-
Kompakt modeller (meselem, IRP500S) tutujyΦ50–Φ500mm.
-
Uly göwrümli modeller (meselem, IRP2000AD) şuňa çenli işläp bilýärlerΦ2000mm.
Biz barada
XKH ýokary tehnologiýaly optik aýna we täze kristal materiallarynyň işlenip düzülmegine, öndürilmegine we satylmagyna ýöriteleşýär. Önümlerimiz optik elektronika, sarp ediş elektronikasy we harby ulgamlara hyzmat edýär. Biz Safir optiki böleklerini, ykjam telefon linzalarynyň örtüklerini, keramika, LT, kremniý karbidi SIC, kwars we ýarymgeçiriji kristall plitalaryny hödürleýäris. Hünärmen tejribe we iň täze enjamlar bilen biz standart däl önümleri gaýtadan işlemekde üstünlik gazanýarys we öňdebaryjy optoelektron materiallary ýokary tehnologiýaly kärhana bolmagy maksat edinýäris.

Baglanyşykly önümler
-

4H ýarym HPSI 2inch SiC substrat wafli Producti ...
-
Kwadrat gutularyň ulag gutusy kwadrat penjire p ...
-

6 dýuýmlyk HPSI SiC substrat waferi Silikon Karbid ...
-

Gemstone Al2O3 kristal ru üçin sapfir korund ...
-

Alýumin metal monokristal substrat jylaňlaýjy ...
-

Örtülen wafli, sapfir wafli, kremniý wafli...